LEMUR GUITARBOT - BALANCE OF POWER
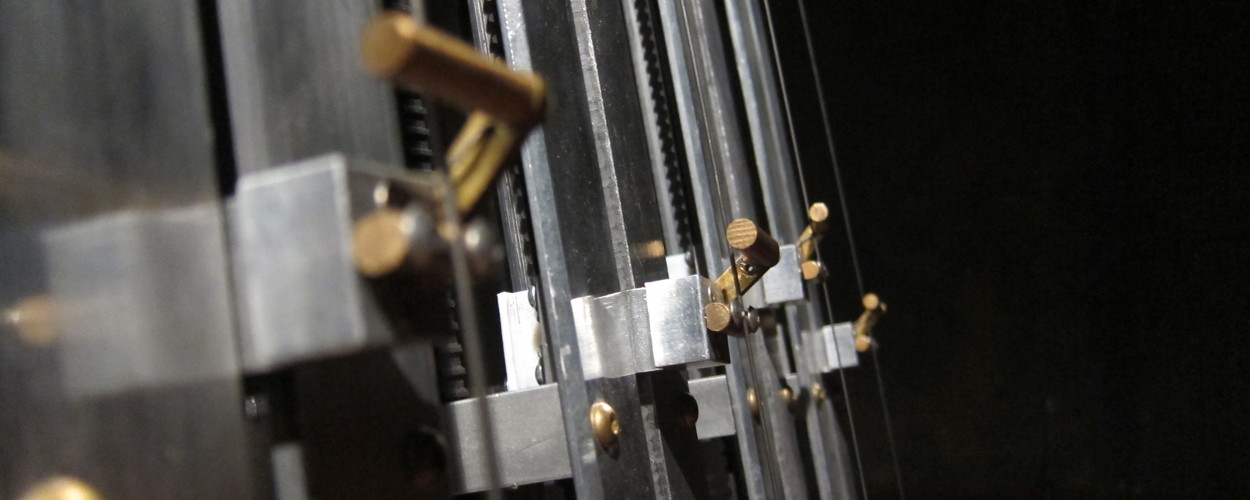
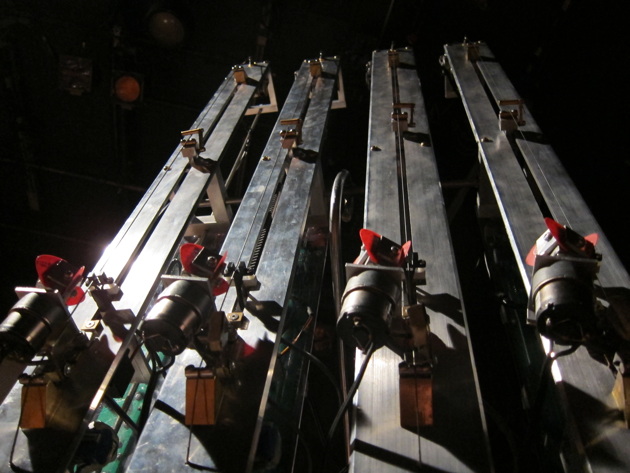
Primarily I set the computer to algorithmically generate two kinds of sounds from the robots. First the scraping sounds of the slowly crawling frets, and second those from crashing the frets vigorously against the bridge. The third sound – a high pitch you hear throughout the piece – comes from the circuit boards, picked up by the microphones. These sounds feed in turn the computer processing unit (basically a modified version of my Endangered Guitar software), which again converts them into MIDI information to play the robots.
This feedback loop can go on for a while, and what you hear is a multi-channel recording of the guitar pickups, several microphones and computer processing channels, mixed down to 5.1 surround. The piece has three movements, occasionally I interfere with the balance of power to give it a new direction, until at the end, as usual, that balance gets out of control.
The original piece is in 5.1 Surround Sound, making extensive use of the spatialization of sounds. The piece was presented on surround sound installations and presentations in the US, Germany and Bulgaria. The version below is a stereo mix / recomposition of the 5.1 piece.
LEMUR GuitarBot 2004
Hans Tammen – GuitarBot Control
Kurt Ralske – video
I did set up a feedback loop between my Endangered Guitar software and the LEMUR Guitarbot, each sounds controlling the sounds of the other device. Kurt Ralske used the sounds to control his video, too.
Shadow Puppies w/ LEMUR GuitarBot at RPI 2004
Nick Didkovsky – guitar & homebrew software (plus LEMUR Guitarbot control)
Hans Tammen – guitar & homebrew software (plus LEMUR Guitarbot control)
Kurt Ralske – video & homebrew software
Produced 2004 at CREATE@iEAR at Rensselear Polytechnic Institute, Troy. More about the Shadow Puppies here.